

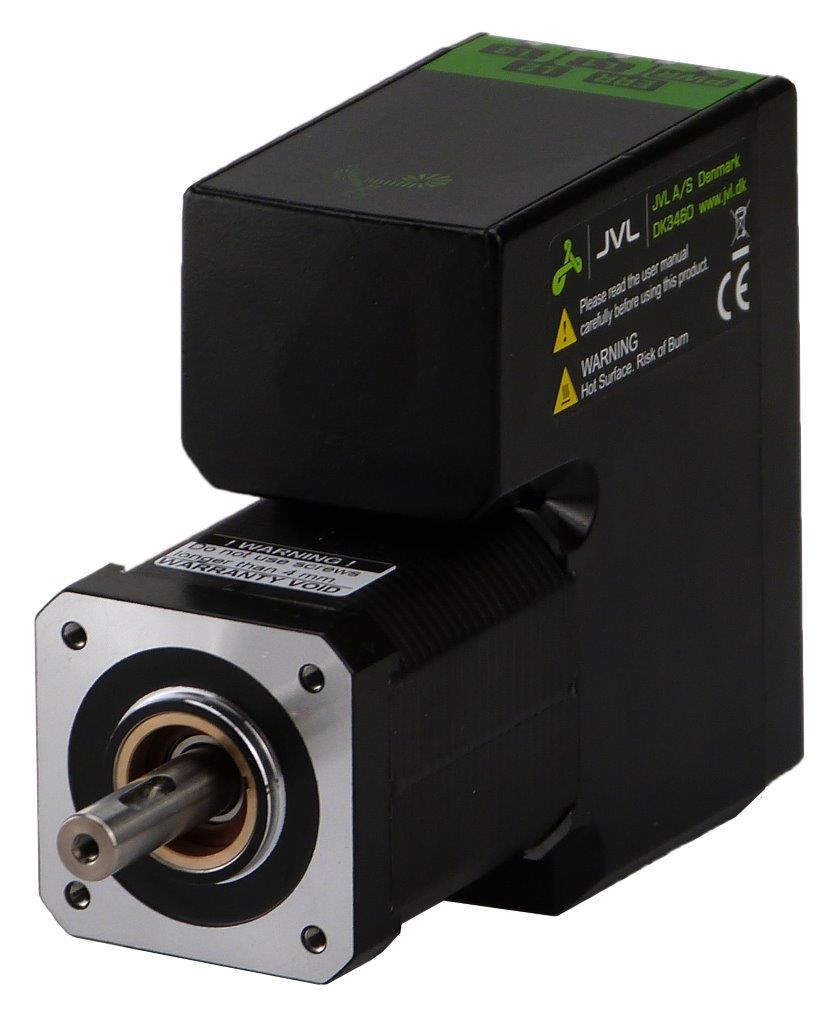
Integrated Stepper Motor and Controllers with CANbus
|
CAN Open slave interface with baudrate up to 1Mbit. All registers of the MIS motor can be read and written to. The module has M12 connectors for use in harsh environments and BUS IN and BUS OUT for easy implementation of bus systems. Dynamics mapping where single bit, 16/32 bit can be combined for fast and efficient bus communication.
|
 |
|||||
| Integrated Stepper Motor |
||
 |
MIS171 to MIS176 |
|
| MIS231Q to MIS234T |
||
 |
MIS340 to MIS343 |
|
 |
MIS430 to MIS432 |
|
| Stepper Motor Controller |
||
 |
SMC66 0-6 Amp PN: SMC66B1-P6AABX1 More info Matching motors |
|
 |
SMC85 0-9 Amp PN: SMC85C1-P6AABX5 More info Matching motors |
|
|
The MIS motor range MIS17/23/34/43 and Stepper Motor Controller SMC66/85 now have a completely new firmware update including DSP402 where sync, interpolated position mode is supported. JVL now supports master-slave synchronization without external PLC. The new feature will let you quickly set up applications like lifting a load in 4 corners. MacTalk is used to program the master motor. You can connect up to 29 slaves. The master automatically finds the slaves on the bus, and the master automatically. configures them. A primary benefit is the speedy setup time. For easy control, a JVL HMI can be added to the master motor. The new Master-slave feature is supported by all MIS Integrated ServoStep motors with CANopen.
|
 |
|||||
- All motor functions available in CANopen through DS301 gateway objects
- Easy configuration and test of SDO and PDO from PC through JVL CANexplorer.
- DSP402 with Profile Position Mode, Velocity Mode, Homing Mode, and Interpolated Position Mode.
- Non CAN standard Master-slave follow motor where up to 30 motors can run synchronized
- TwinCAT 3 compatible
- Synchronized velocity mode
- Synchronized Position mode
- Synchronized homing.
- Slave monitoring
- Speed correction for closed loop motors
- Up to 29 slaves
- Sync interval 10 mS
- Under development sync interval 2 mS with max 8 slaves
How it works:
Each slave has a threshold for allowable following error before overspeed. When following error for that slave exceed the threshold, the slave will speed up to catch up to the network.
The master receives the following error for each slave. If the slave with the largest following error exceeds the master threshold, the master slows down the entire network. The slave with the following error exceeding its own threshold is still running overspeed to catch up.
If the masters following error exceed the overspeed threshold, the master only will speed up to catch up.
If a slave’s following error exceeds the maximum allowable following error, the slave stops with a following error fault, and the master distribute the stop to the network.
The master receives the following error for each slave. If the slave with the largest following error exceeds the master threshold, the master slows down the entire network. The slave with the following error exceeding its own threshold is still running overspeed to catch up.
If the masters following error exceed the overspeed threshold, the master only will speed up to catch up.
If a slave’s following error exceeds the maximum allowable following error, the slave stops with a following error fault, and the master distribute the stop to the network.
What to order as example. Motor with lower and higher torque and absolute mulitiurn encoder available:
| Part number |
Description |
Photo |
| Motors | ||
| MIS176Q35P6H266 |
Nema17 0.8 Nm |
 |
| MIS232Q1P6H266 |
Nema23 1.97 Nm |
 |
| MIS340C12P6H285 |
Nema34 3.0 Nm |
 |
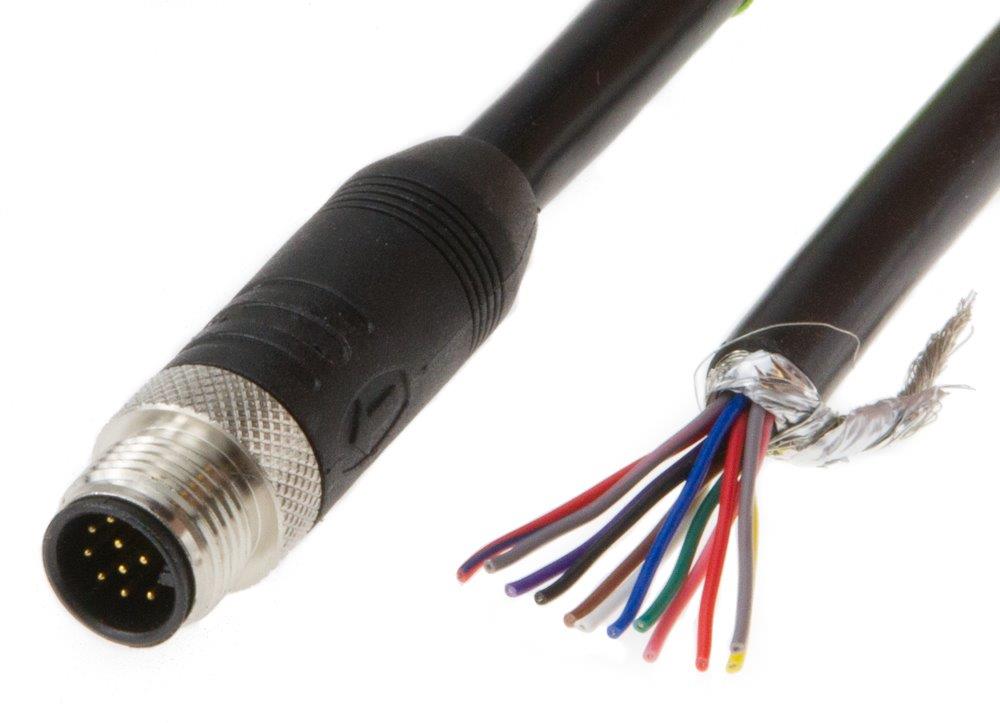
| Cables | ||
| WI1000-M12F5T05N |
M12 Shl Cable 5 m 5 pin Fem 0°, Power |
 |
| WI1006-M12M5TM5T.3N |
M12 0.3 m 5p Male/Male 0° CAN Twisted pair |
 |
| WI1006-M12M5TM5T05N |
M12 5 m 5p Male/Male 0° CAN Twisted pair |
|
| WI1009-M12M17T05N |
M12 Shl Cable 5 m 17p Mal 0° MIS34x,Ex41 twisted |
 |
Read more about program CANOpenExplorer made from developers here.
Find how to use MIS CANopen motors as NC axis in TwinCAT here.
Find the EDS file here.
Find TwinCAT 3 example program here.
Find CANopen conformance test report here.
CAN documentation and register overview can be found in usermanual here.
Read more about USB to CAN converter here.
Download Beckhof CANopen project NC axis here.
Find CANOpen press release here.
Read more about CANopen Master-Slave Synchronization here.







JVL A/S Bregnerødvej 127 DK-3460 Birkerød Denmark
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
