

MODBUS Multiaxis
Connect multiple JVL motors through low cost RS422 motors to an existing IOlink, CANopen, Wireless ethernet, Ethernet, DMX512 motor.
Topology One link , One motor for fast response on all motors
Features:
- Connect multiple JVL motors through low cost RS422 motors to an existing IOlink, CANopen , Wireless ethernet, Ethernet, DMX512 motor
- All motor can have MACtalk communication together with MODBUS or CAN communication
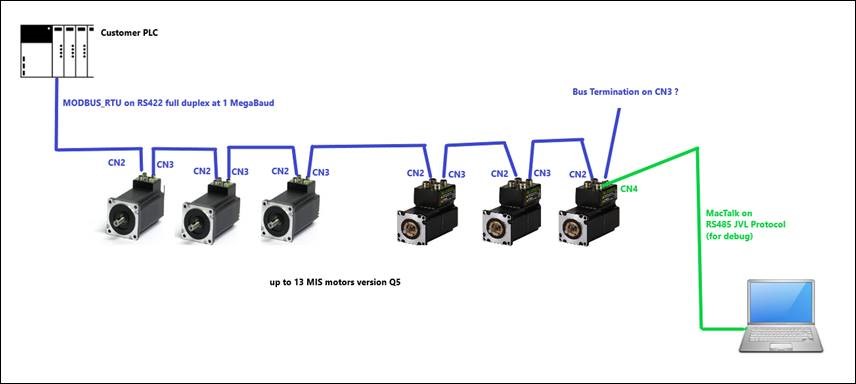
- Control multiple motors in daisy chain RS422 network
- Connect multiple JVL motors to an existing Ethernet based network ?
- Save between 10-15% in the investment costs when integrating JVL drives by using IOLink instead of an traditional Ethernet based control network.
- In 90% of the applications where JVL drives are used, the specific axis is used as a setup axis, only requiring a minimal of bandwith and no hard timing requirement
- For the Rockwell environment AOI’s are supported.
Features CAN:
- CAN motor have MACtalk +MODBUS + CAN communication at the same time
- Control motor point to point
- 1Mbit
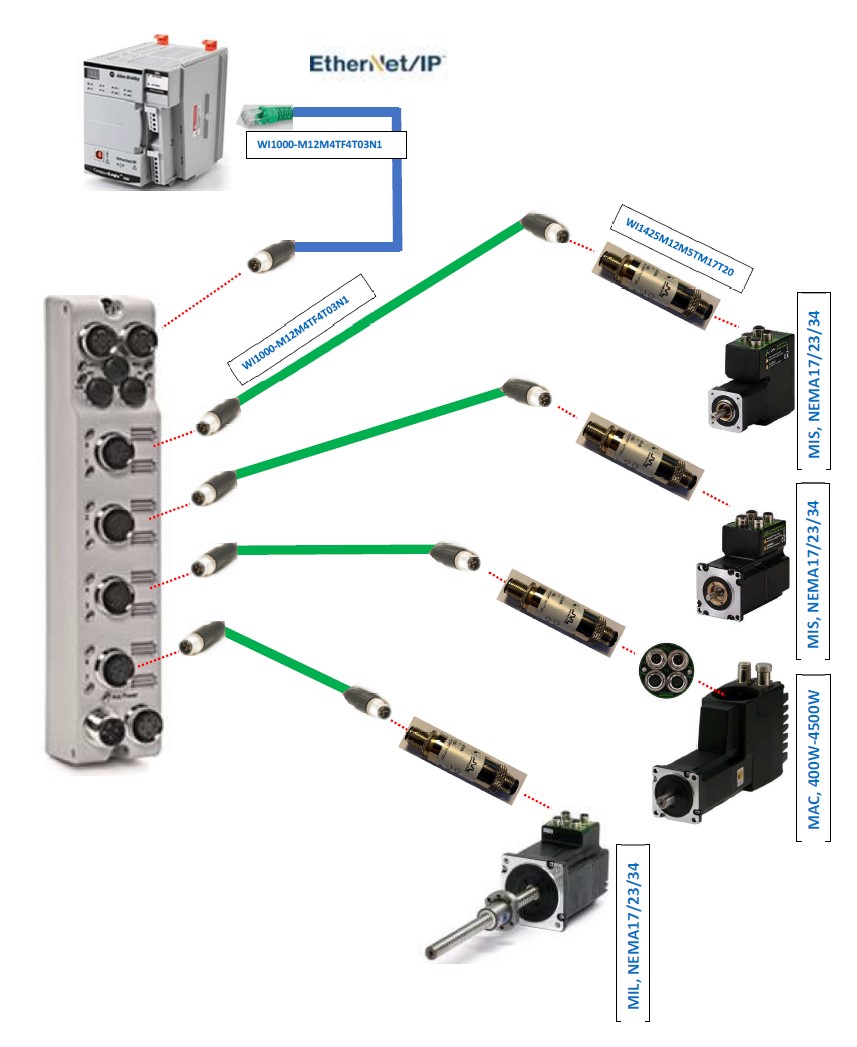
Features IOLINK module WI1425x:
- By using IO-Link and the new JVL IO-Link gateway a JVL drive (servo or stepper) can be controlled directly from the PLC through an IO-Link Master.
- IOLINK demand gateway module with IOlink M12 5Pin in and 17pin out that connect to stepper or servomotor.
- Motor 1 should have a WI1425 module connected but additional motor can be low cost RS422 MIS*Q9* motors
- Connect multiple motor through a RS422 On same motor connect M12 8pin to motor 2 M12 17pin etc.
- IOLink compatible with Rockwell Armorblock 1732E-8IOLM12R, Siemens and others
- Max 1 Mbit RS422 for only MODBUS and IOLINK motor network.
- Even though the IO-Link based JVL control never was intended to be used in hard timing restrained application, reaction times an be very low.
- The JVL gateway is placed inside a rugged metal tube. 2 Leds indicates the current Link status.
- The metal gateway screws directly into one of the IO-connectors on the motor and an
- IO-Link cable is connected to the other end, that goes directly into the IO-Link master.
- The JVL Gateway is delivered with either 8, 12 or 17Pin connector depending on the
- type of JVL drive used.
- For the MIS motors an added bonus, up to 5 motors can be connected to one IO-Link channel by utilizing multidrop topology on an internal JVL bus, running between the motors.
- For the MAC servo motor range an MAC00-B4 module is required for each motor. Observe that these drives requires one IO-Link channel per. Drive.
- All normal motion functions can be controlled through the IO-Link channel.
- For the MIS Servo stepper series, the Gateway tube connects directly to the 17Pin connector.
Feature Wireless Ethernet:
- Wireless ethernet is build into motor so only antenna is outside. Use the motor internal switch to connect to multiple other Ethernet motor
- MODBUS motor ie 17 pin RS422 MODBUS input and 8 pin MODBUS output to multiple other RS422 motors.
- Use Master with 4-8 channels for point to point to each motor for fastest response. Use daizy chain connection for non timecritical application (The more motors the slower it gets).
- Max 460Mbit RS422 MODBUS for motor with Ethernet
- This Master usually connects directly to the PLC via the Ethernetbus.
| CANOpen |
IOLINK |
Ethernet Wired |
Wireless Ethernet |
DMX512 |
J1939 |
Master slave MODBUS |
Slave follow MODBUS |
|
| Hardware Physical layer |
CAN RS485 |
IOLink 24V seriel WI1425M12M5TM17T201 |
Ethernet |
Wifi+Profinet/EthernetIP ModbusTCP/UDP |
RS485 or RS422 |
CAN RS485 |
RS422 duplex |
RS422 duplex |
| JVL MACmotor module |
MAC00-FC41 |
MAC00-Ex41: WI1425M12M5TM17T201 MAC00-B41: WI1425M12M5TM12T201 MAC00-B4 : WI1425M12M5TM8T501 |
- |
MAC00-WI ( EthernetIP) MAC00-WP (Profinet) MAC00-WM ( MODBUS TCP/UDP) |
MAC00-FS4 |
n/a |
MAC00-B4 MAC00-B41 MAC00-Ex4 |
|
| JVL motor MIS/SMC66/85 |
MIS/SMC*P6* |
WI1425M12M5TM17T201+ MIS/SMC*Q5/Q9 |
MIS/SMC* E2 Ethercat+MOSBUS E3: Ethernet/IP+MODBUS E4:Powerlink+RS422 E5: Modbus TCP+MODBUS E6: Profinet+SSI |
MIS/SMC WI ( EthernetIP) WP(Profinet) WM ( MODBUS TCP/UDP) |
MIS/SMC *Q5/Q9 |
MIS/SMC *P6* |
MIS/SMC *Q5/Q9 |
MIS/SMC *Q5/Q9 |
| AIO support |
PDO Max5 motors with multidrop |
|||||||
| Max number of nodes. Address range |
255 |
255 |
65535 |
512 |
||||
| Syncronization |
Yes |
No |
||||||
| Cyclic Sync cycletimes |
||||||||
| Minimum cycle time |
1mS for 5 Reg |
|||||||
| Drive profile |
CiA402 |
Planned Profidrive |
No |
|||||
| Daicychain |
Yes 5pin M 5p Female |
Yes |
Yes Wireless ethernet in. Ethernet or MODBUS out |
|||||
| Communications speed |
460 kbit |
9.6 to 921kbit |
||||||
| Reaction time |
||||||||
| Read & write IO+reg in motor |
Yes |
Yes |
Yes |
Yes |
Yes |
Yes |
||
| JVL AOI |
Yes Rockwell |
|||||||
| JVL Function Block |
Yes Siemens Profinet |
|||||||
| JVL Example |
Yes Beckhoff |
|||||||
| Motor suppported |
MIS*Q5*/*Q9* |
|||||||
| Protocol supported |
||||||||
| User organization |
Link |
Link |
Link |
Link |
Link |
Link |







JVL A/S Bregnerødvej 127 DK-3460 Birkerød Denmark
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
