

Partner
"As a Preferred Drives Company JVL Industri Elektronik has a special arrangement with Trio Motion Technology Ltd, a UK specialist in high performance motion control to supply their EtherCAT masters via out own worldwide network of distributors. The combination of our EtherCAT drives together with the Trio MC4N ECAT master offers a world beating package for multi-axis machine control in the automation industry for practically any application."
 |
||
|
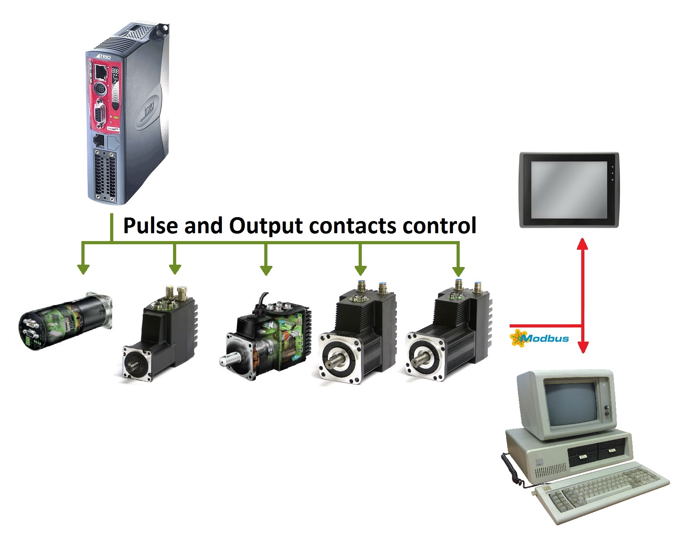
It is an open high performance Ethernet-based fieldbus system. The development goal of EtherCAT was to apply Ethernet to automation applications which require short data update times with low communication jitter and low hardware costs. |
|
|
||||
| MC4N-ECAT | Application | |||
|
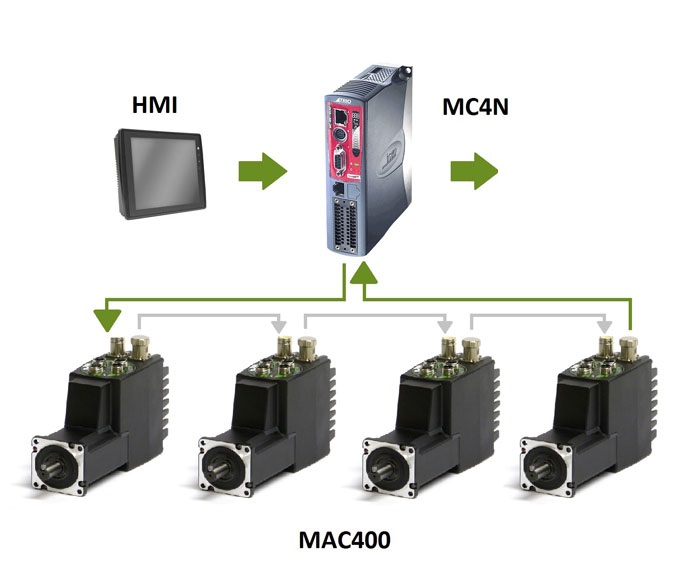
TRIO´s MC4N-ECAT extends the MC4N range of Motion Coordinators for networked drives which started with the MC4N-ECAT.
up to 32 axes of motion with 64 bit integer
position registers for ultra-precise
axisresolution. |
 Controller: MC4N
Motor: MAC140, MAC400, MAC800, MAC1500, MAC3000 HMI: Any brand is available, RS-422 Modbus 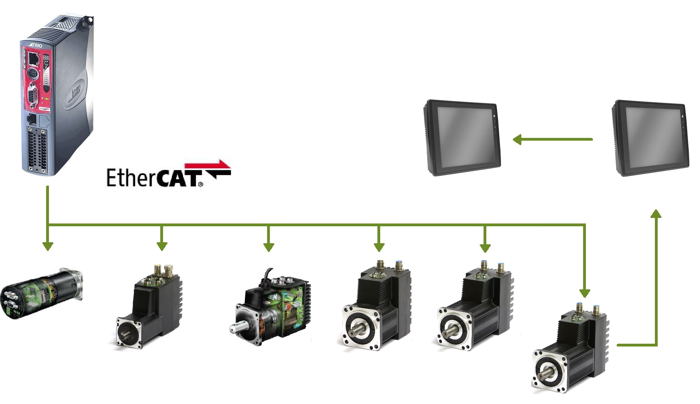 Controller: MC4N
Motor: MAC140, MAC400, MAC800, MAC1500, MAC3000
|
|||
| Design Concept | ||||
 |
||||








JVL A/S Bregnerødvej 127 DK-3460 Birkerød Denmark
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
Tel: +45 4582 4440 Fax: +45 4582 5550 E-mail: jvl@jvl.dk
